Juniper Publishers| Robotics Engineering
Linear Algebra
Continuous Dynamic Control for WMR
Authored by Sebastian
Godoy
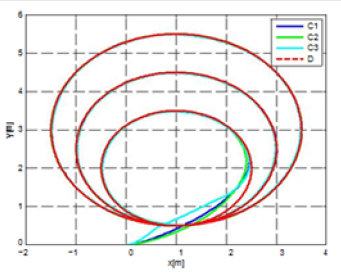
A trajectory
tracking controller for wheeled mobile robot (WMR) is presented in this paper.
The approach is based on the dynamic model of a nonholonomic mobile robot. The nonlinear
dynamic model is used to find the expression of the control actions which make
the robot follow a desired trajectory. The methodology for controller design is
based in Linear Algebra theory. Experimental results in a Pioneer 3DX mobile
robot are presented and compared with other approach of the literature.
To read more… Full Text
in Robotics & Automation
Engineering Journal in Juniper
Publishers


Comments
Post a Comment