Color based Object Tracking Robot- Juniper Publishers
Juniper Publishers- Journal of Robotics

Abstract
This article presents a vision based object tracking
robot controlled by a computer software. We developed a robotic object
tracking such that it can track objects based on color. Introducing
color along with the shape of the object reduces false detection. The
unique features of this system are its ability to perform simultaneous
real-time image acquisition and range sensing. Furthermore, its flexible
design, confers the ability to handle a wide range of tasks. In this
case the object of interest is a red circular shape. The system is
designed to track the object in its Y-Z plane using robotic manipulator.
The program for color based object tracking is written in MATLAB. The
camera is used to track the object and decide the motion of the system.
The object of interest is detected successfully using two stages, color
detection followed by shape detection. The detected object is then
tracked by the robotic end effector very closely.
Keywords: Object tracking; Robotic manipulator; Color based object
Introduction
Object detection and tracking are essential elements
of many computer vision applications including activity recognition,
quality control, parts recognition, autonomous automotive safety and
surveillance. It is required for surveillance application, autonomous
vehicle guidance, collision avoidance and smart tracking of moving
objects. They are used in various fields such as science, engineering
and medicine.
Detecting and tracking an object of interest in a
known or an unknown environment is a challenging task in areas of image
processing and computer vision system. While detection of color or shape
irregularities is of interest in image processing, the techniques for
faster detection, tracking and extracting object information is more
complex in computer vision. Prior knowledge of object to be tracked like
its shape, color etc. helps in faster tracking in mobile robots.
Moreover, the change in lighting conditions in real time environment
offers a challenge in color based tracking systems.
The robotic vision systems are mostly operated in
environment which undergo a lot of dynamic changes. Learning models is
an important aspect for autonomous robots to be able to navigate in such
dynamic environment [1]. The work presented in [2]
designed a robotic system that tracks an unknown color spherical object
with uses HSV color space and automatic color detection mechanisms. The
technique of Kalman based object tracking filter was presented while
the proposal in [3]
presents a modelling of robot using MATLAB Sim mechanics. The simple,
intuitive and accurate modelling method eliminates the need to compute
the forward dynamics which is cumbersome. Researchers have performed
this tracking and detection in some wireless mobile robot using the
concept of perpetual color space. Vision based systems introduced in
such works uses a wireless camera that keeps the desired target at the
center of the image plane [4].
Object tracking using computer vision is a crucial
component in achieving robotic surveillance. For object tracing we need
to locate the object in subsequent frames. Object can be tracked by
identifying and tracking some specific features of the object in motion
such as color or shape. The trajectories of the object in motion can be
traced by using this process over a longer duration of time. In the
method proposed in [5]
the moving object is separated from the static background. The
algorithm assumes that the background is relatively more static than the
foreground. When the object moves, some regions of the video frames
will differ significantly from the background. Such frames can be the
moving object which is our object of interest.
The main aim of the object tracking is to track the
object based on the information obtained from video sequences. Various
methods have been proposed to encounter this problem [6].
In this research, we are presenting a robotic vision system that track
an object based on its color in a known environment. This includes color
detection based on binary image. Once the object of interest is
identified, its coordinates are tracked and given as physical input
signals to the robotic joints that control its movement. The mobile
robot should be able to process the moving targets to detect the object
of interest. This can be best achieved by addition of an active camera
for real time tracking. This research uses a camera as the eye of the
robot. The camera captures the multiple frames video in RGB color scale
within a very short time. The robot is designed using solid works
software and MATLAB is used for image processing and sending the signals
to the robotic joints. MATLAB converts the RGB image frame to binary
image for better object tracking. To enhance the tracking operation, the
objects are located using color based image segmentation that preserves
the object information. The system can locate and detect the color
based objects using information obtained from image sensor. We have also
used filtering to remove noise from the image to improve the efficiency
of the system.
System components
Vision based object tracking robot comprises of
multiple tasks; such as image acquisition, mapping, data analysis and
image location identification.
Image acquisition and mapping
Real time environment vision applications require a
functional USB camera attached to the robot. Objects can be detected
easier in high resolution images. To take real time video, video input
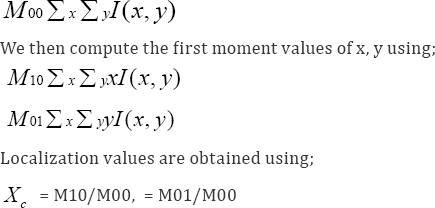
object is created, and stream is viewed. This can be done by computing
the zero moment of the coordinates (x, y) using;
RGB to binary image conversion and filtering
Tracking of the moving object involves concentrating
the luminescence of the non-ideal environment which is achieved using
various mathematical models called color spaces. RGB is a convenient
color model for computer graphics which is compatible with human vision
system and it is used in this research. RGB color space uses three
chromaticity of red, blue and green color [4].
Once the image is captured, it is converted from RGB input image to
binary image where “one” represent the presence of an image and “zero”
represent the absence of an image. Binary image shows the presence of
noise as unexpected colors spread all over the image. To remove the
scattered color components, function b ware a open () in MATLAB is used.
This function removes all connected components (objects) that have
fewer than P pixels from the binary image BW thereby producing another
binary image, BW2. The default connectivity is 8 for two dimensions, 26
for three dimensions, and conndef (ndims(BW),'maximal') for higher
dimensions. This operation is known as an area opening [5].
Furthermore, the median filter is used to enhance or
smoothen the obtained image. This filtering technique basically modifies
each value of pixels by the median value of the neighboring pixels. The
new value obtained is the median of the sorted pixel values present
within the window as given in equation (1) [7].
NewPixel (x, y) = Median (sorted array of neighboring pixels) (1)
The object of interest detection which is a circular
red object in this case can also be detected and tracked using the Hough
transform followed by Mexican hat filter [8].
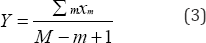
Centre calculation
The center coordinates or pixel coordinate (Figure 1) is calculated using equations (2) and (3) [4], where 'x' is the ratio of Sum of column numbers having ,one- to the total number of columns having ,one-.
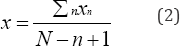
Similarly, 'y' is obtained by diving the sum of row numbers having 1 with the total number of rows having ,one-.

Robotic arm
Fanuc 430i which is six axes for flexible automation has been used in
this research. In our application, we are using two translational
degrees of freedom (heaving and swaying) and two rotational degrees of
freedom (pitching and yawing). We can't use the other two degrees due to
the physical constraints of the current system.
Methodology
Figure 2
shows simulation flow chart used for detection and tracking of a red
colored circular object using robotic manipulator. The integration of
color with the circular shape helps to overcome false reading even if
the lightening conditions are changed. False detections can be greatly
reduced by considering the shape of the object. First stage is to read
the video stream of the real-time environment. The MATLAB code written
will configure the camera to read real time data, then extract from the
video stream. The acquired frame is then processed to identify the
object of interest.

Next stage involves extracting the red color
components from the frames. Circular shape is detected using Hough
Transform 2 stage function which is an inbuilt function in MATLAB. This
is done by converting the image to gray scale image and then extracting
the red colored components. The two stage Hough transform function finds
circles in an image with radii in the range specified. It also
estimates the radii corresponding to each circle center. The detected
centers and radii are stored in the Matrix form. The image is then
filtered to remove noise and converted to binary. This image is again
filtered to remove pixels less than 300 which further enhance the
accuracy and reduce false detection. A circle is then drawn around the
detected object. The center of this object is calculated using the
MATLAB in built function. This center is then passed to the robot
end-effector.
Design of robot
Robotic manipulator (Fanuc 430i robot) is designed
using Solid Works software. Six degree freedom manipulator is used in
this system to give greater flexibility of movement in real world
applications. We use the "eye in hand” configuration for the sensor,
i.e., the camera is attached to the last link instead of an end
effector. Figure 3 shows the snap shot of the robotic arm designed with camera attached to the end position.

.The manipulator is built using solid works is
exported to MATLAB Simulink. This is then linked with the solid works
using some specific MATLAB Commands [9].
The export procedure generates one XML file and a set of geometry files
to be imported into Simscape Multibody to generate a new model.
Track detection & control
The robot should follow the object of interest (Red
Ball). The desired end effector position is given by the coordinates of
the Object tracked. MATLAB will provide this coordinates to the sim
mechanics model [10]. An Inverse kinematics model is developed and added to the sim scape blocks as shown in Figure 4.
This inverse kinematic model will take the Object coordinates as the
final position and calculate the joint parameters like joint angle and
joint displacement to reach that desired position. The inverse
kinematics model consists of 6 Revolute blocks corresponding to the 6
revolute joints of the robot to ensure the movement of robot in 6 DOF.
It also consists cartesian coordinate blocks to ensure that the robot
can move linearly [11-12].

Results
Simulation was performed on MATLAB that continuously
access the image frame from video stream. The code designed to color,
and shape detection will detect the red ball which is the object of
interest. Figure 5
shows the snap shot of the video frame where the red ball is detected
and marked by a yellow circle from a group of different colored and
different shaped object. Figure 6 shows Snap shot of Robotic Arm Positions as it Tracks the Object.

Then, the code calculates the coordinates of the
object detected and send it to the Simulink blocks. The inverse
kinematic link takes these as input and calculate the joint variables
like displacement and joint angles and feed it to end effector which
will then move accordingly.

Figure 7
compares the path of the red ball which is the object of interest and
the path of the robot end effector. The robot closely follows the red
ball. The use of color along with the shape has helped to minimize the
false detection to some extent. The x axis in the graph for the path of
Red Ball detected represent the pixel values, whereas the x axis of the
path of the end effector represents the movement of the robotic end
effector in meters.

Conclusion
This paper presents a color and shape based object
tracking robot. We have incorporated the color detection along with the
shape detection to reduce false tracking. The robot used in this paper
utilizes camera for images acquisition and instructions from computer to
perform motion trajectory to track the desired object. The end effector
could successfully track the red balls path with the help of tracking
algorithm developed in Matlab and the Inverse kinematics loop which has
been developed in Simulink consisting of revolute and Cartesian
coordinate joints to control the movement of the end effector.
The performance of the system can be further enhanced
by using trained classifiers that minimizes the false detections which
may occur due to varying light conditions. These classifiers use a
statistical learning algorithm to produce a generic model of the object
to be tracked. Addition of sensors like sonar and infrared helps to
extract the image properties like distance, depth etc. more accurately.
Multi cameras can be introduced to enable stereo vision based
applications in
3D object reconstruction. Further researches can be done to
incorporate fuzzy and neural networks to deal with multiple
object tracking methods.
For more open access journals please visit: Juniper publishers
For more articles please click on: Robotics & Automation Engineering Journal

Comments
Post a Comment